電感式接近傳感器
電容式傳感器
光電傳感器
磁感應傳感器
激光測距傳感器
速度傳感器
測量傳感器
壓力/溫度傳感器
振動傳感器
安全傳感器
行程限位傳感器
帶式輸送機保護
鋼鐵行業檢測
紡織專用傳感器
無線傳感器
自動化智能控制事業部
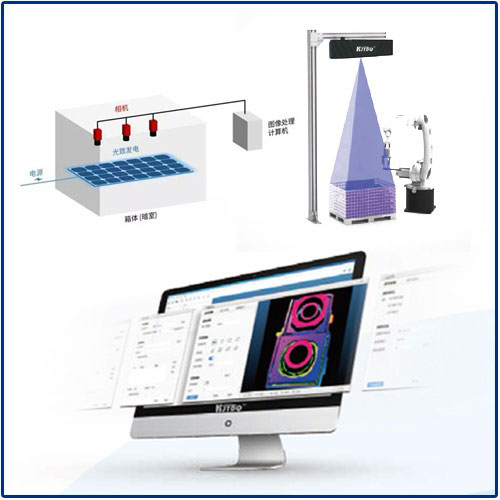
視覺缺陷檢測系統
軍用傳感器
替代進口傳感器系列
傳感器配件
錯誤:找不到頁面!
頁面搜索錯誤,請您移步到主頁。瀏覽我們的產品,我們將竭誠為您服務。
咨詢熱線(Tel):025-66075066
售后電話(Tel):025-65018619