
-
-
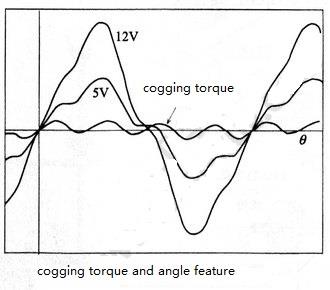
2020-12-10 怎么樣提高步進電機的定位精度
改善驅動電路,額定電壓(電流)驅動:從額定電壓降低電壓來驅動步進電機,發現位置定位精度較差;電機改進,定子結構的微調的改進:已知定子的微調結構可以提高位置定位精度。以兩相電動機為例,該微調結構可以減小齒槽轉矩,并且角度特性變為正弦波。
-
-
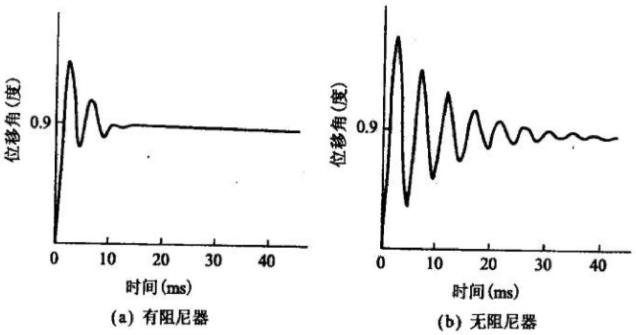
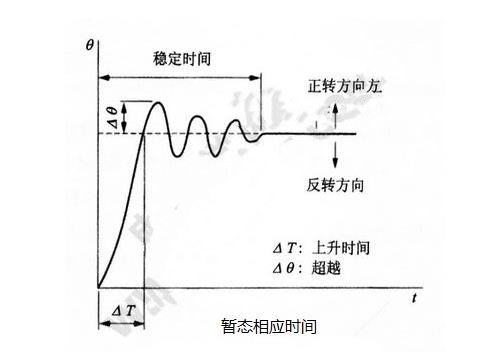
2020-12-09 怎么樣改善步進電機阻尼特性
步進電機的位置定位時,因為電機負載和轉子儲存的動能,不能立即停止,會產生超調量,反復經過設定點后停下來。此種反復振蕩延長了定位時間,有必要改善電機的阻尼和定位時間。改善的方法有安裝阻尼器和利用驅動電路及電機本身的改善等。
-
-
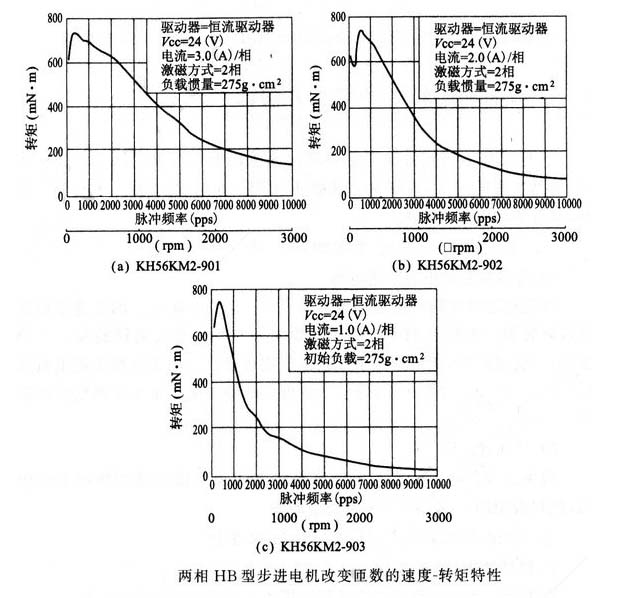
2020-12-08 怎么樣增加步進電機動態轉矩
下面從速度-轉矩特性考慮要增加步進電機動態轉矩的解決方法。增加轉矩時,根據速度的高低,其解決方法各不相同。而解決方法既有電機方面的,又有驅動電路方面的。
-
-
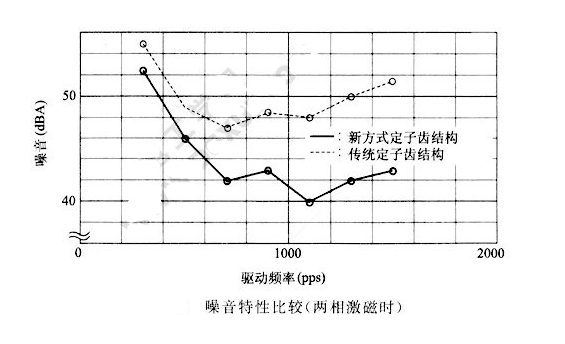
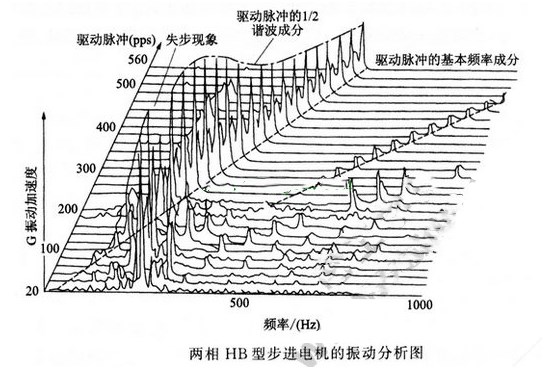
2020-12-07 如何降低步進電機的振動噪音?
步進電機的振動噪音由步進電機本體引起的原因如下:(1)激磁電源高次諧波成分(2)齒槽轉矩(3)徑向吸引力引起的轉子變形產生的振動噪音(4)定子與端蓋的剛性不夠(5)線圈及磁路的不平衡,及機械結構的不對稱(6)各部分分配合松動(7)線圈本身的位移(8)轉子偏心或動平衡不好(9)軸承預緊力不合適
-
-
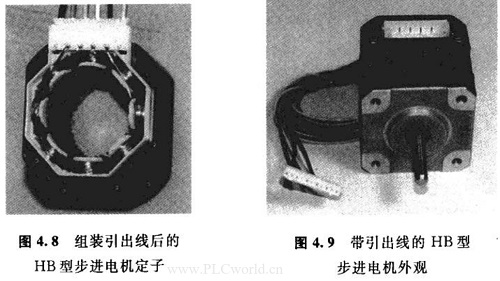
2020-12-04 步進電機絕緣材料與線圈的特性
步進電機的絕緣材料或引出線及線圈等需要依據電機的耐熱等級選擇合適的材料。HB型步進電機使用E級(120°)絕緣,也可根據特殊要求,選用B級或F級絕緣材料。
-
-
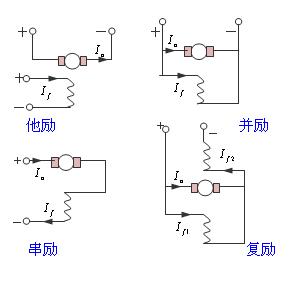
2020-12-03 電機勵磁是什么意思?有哪些勵磁電機?
勵磁,勵就是鼓勵、激勵的意思;磁就是磁性、磁場的意思。勵磁,用俗話說就是加強磁場。磁場加強后,電機的做功就會增加的了,會轉得更快更有勁的。
-
-
2020-12-02 步進電機的基本特性:靜態、動態、暫態特性
步進電機的基本特性包括電機靜態特性、連續運動特性(動態特性)、電機啟動特性和電機制動特性(暫態特性)。
-
-
2020-12-01 步進電機怎么樣測量噪音和振動
測量時選用JIS C 1502(普通噪音計)中所適用的噪音計,頻率校正為A特性。測量場所其背景噪音以及周圍的反射音應盡可能小,而且其變化影響小的場所。電機利用線懸掛或在彈性體上實施測量。
-

-
2020-12-01 使用環境對電機的影響
步進電機的使用受到工作場地的溫度和濕度限制,其使用場所不僅限于屋內。OA機器一般用于屋 內環境良好的場所,步進電機使用環境處于密封狀態;但應用于汽車和FA機器時,也會處于多塵埃的環境;或置于屋外的機器(監視器等);或在高溫的環境下使用。步進電機生產廠家的標準機種在樣本上都有說明。如要特殊訂貨應與廠家商洽
-
-
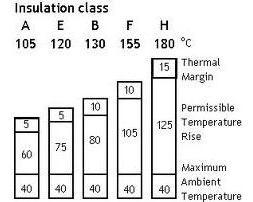
2020-11-30 電機B級絕緣是什么意思?電機的絕緣等級如何劃分?
按照溫度大小排列分別為:Y、A、E、B、F、H和C。它們的允許工作溫度分別為:90、105、120、130、155、180和180℃以上。因此,B級絕緣說明的是該發電機(電動機)采用的絕緣耐熱溫度為130℃。使用者在發電機工作時應該保證不使發電機絕緣材料超過該溫度才能保證發電機正常工作。
-

-
2020-11-30 電機上的防護等級是什么意思?IP65是什么意思?
IP后的前一個數字表示防塵,后一個數字表示防水 數字越大,效果越好。 IP電機防護等級
-
-
2020-11-27 轉速因素對步進電機的影響
選用市面出售的產品,根據使用速度,選擇步進電機工作在最佳狀態很重要。步進電機速度分為:只在低速下使用、在2000rpm以上的高速使用和由低速到高速寬范圍使用三種速度狀態,步進電機的選擇會因此而有所不同。
-
-
2020-11-26 混合式步進電機的發展趨勢
發展趨勢之一,是繼續沿著小型化的方向發展。隨著電動機自身應用領域的拓寬以及各類整機的不斷小型化,要求與之配套的電動機也必須越來越小,在57、42機座號的電動機應用了多年后,現在其機座號向39、35、30、25方向向下延伸。瑞士ESCAP公司最近還研制出外徑僅10mm的直線步進電動機。
-
-
2020-11-26 二相步進電機和三相步進電機的性能區別
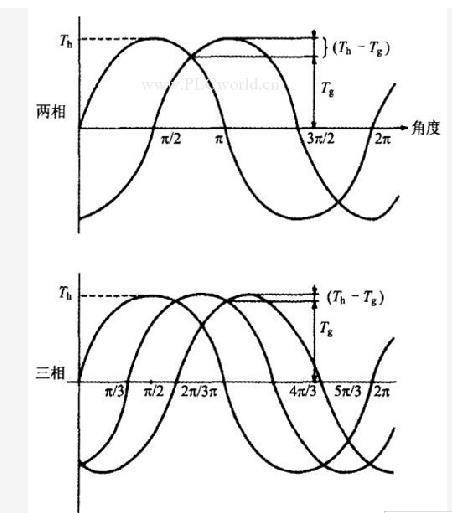
1)分辨率高 根據步距角為180°/PN,故相數P越大,角分辨率越高。提高分辨率,可以提高定位控制精度,改善低速失步,使多相控制成為可能,并且可以改善阻尼(改善制動性能,減小停止時的超調量和制動時間)
-
-
2020-11-25 步距角是什么?步距角是怎么算出來的?
當步進電機切換一次定子繞組的激磁電流時,轉子就旋轉- - 個固定角度即步距角。步距角-般由切換的相電流產生的旋轉力矩得到,所以需要每相極數是偶數。步進電機通常都為兩相以上的,當然也有一些特殊的只有一個線圈的單相步進電機。雖說單相,實為-個線圈產生的磁通方向交互反轉而驅動轉子轉動。實用的步進電機的相數有單相、兩相、三相、四相、五相。

