
-
-
2020-11-25 變磁阻式、永磁式、混合式步進電機有哪些區別?
目前常用的有三種步進電動機: (1)變磁阻步進電動機(VR)。變磁阻式步進電動機結構簡單,生產成本低,步距角小;但動態性能差。 (2)永磁式步進電動機(PM)。永磁式步進電動機出力大,動態性能好;但步距角大。 (3)混合式步進電動機(HB)。混合式步進電動機綜合了變磁阻式、永磁式步進電動機兩者的優點,它的步距角小,出力大,動態性能好,是目前性能最高的步進電動機。它有時也稱作永磁變磁阻式步進電動機。
-

-
2020-11-23 混合式步進電機和反應式步進電機的區別
反應式步進電機采用高導磁材料構成齒狀轉子和定子,其結構簡單,生產成本低,步距角可以做的相當小,但動態性能相對較差,轉矩較小。 混合式步進電機是指混合了永磁式和反應式的優點。其轉子采用齒狀的稀土永磁材料,定子則為齒狀的突起結構。步距角小,出力大,動態性能好,是性能較好的一類步進電動機,目前市場上多用此類電機。
-
-
2020-11-23 反應式步進電機的原理以及優點
轉子由硅鋼片或電工純鐵棒等導磁體構成,轉子外表面為多齒緒(轉子的齒槽在轉動時產生磁骸阻變化故稱為變磁阻電機,簡稱VR)。定子線圈通電時,定子磁極磁化,吸引轉子齒而產生轉矩,使其移動步。與永磁電機產生磁性吸引轉矩和排斥轉矩相比,VR型只產生吸引轉矩。
-

-
2020-11-21 直線步進電機的原理及優勢
直線步進電機是將旋轉型步進電機的氣隙展開伸長成直線。直線步進電機可以直線運動或直線往復運動。旋轉電動機作為動力源,要轉變成直線運動,需要借助齒輪、凸輪機構及皮帶或鋼絲。圖2.43為旋轉步進電機驅動直線運動的機構一軟盤驅動器(FDD)磁頭運動機構。 目前3.5英寸FDD的機構多采用圖2.43(a)的螺桿機構,雖然間隙很小,但效率低,因此高速運行困難,但由于價格便宜得以廣泛使用。
-
-
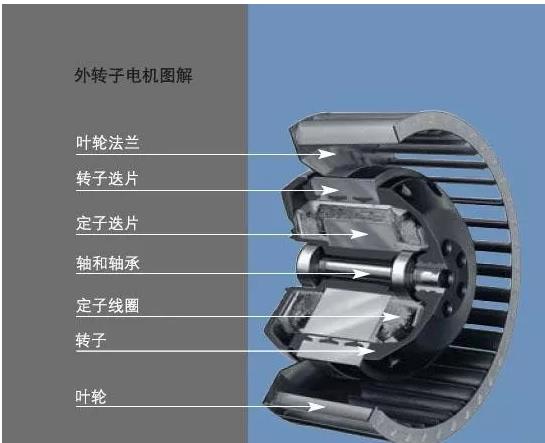
2020-11-20 外轉子電機和內轉子電機的優缺點
轉子為圓環,激磁線圈的定子在內部,其外圓旋轉結構的電機稱為外轉子電機(outer rotor motor或inverted motor)。外轉子電機可以依據其特性用于不同的場合,如應用到低速大轉矩、直接驅動、恒轉速、要求轉速變化小等場合。當電機尺寸大小相同時,內轉子的轉子直徑不如外轉子大,轉矩一-般與D2L成正比(D為轉子直徑,L為軸向長度),而且外轉子在低速下可產生大轉矩。外轉子的轉動慣量大,有利于穩速運行。反之,當需要頻繁起動停止或頻繁調速運行時,包括暫態運行,都不適合使用此種電機。
-

-
2020-11-20 軸向氣隙電機和步進電機對比有什么優勢?
本發明提供一種能在不增大電動機尺寸的情況下實現轉矩提升的軸向氣隙型電動機。 定子與轉子間的氣隙位于軸向結構的步進電機,稱為軸向氣隙電機。圓盤形的永久磁鐵兩面磁化轉子,氣隙軸向配置的步進電機已經由歐洲電機廠家生產銷售,因其低轉動慣量而使其具有快速響應特性,由于分辨率比HB型步進電機差,所以沒有被廣泛使用。
-

-
2020-11-19 醫療器械選擇怎么樣的步進電機?
很多醫療設備,例如生化分析儀、血球分析儀等體外診斷設備會用到步進電機,其實很多醫療設備里面的步進電機的用途和一般電子設備一樣是用作運動機構驅動單元來使用的,但由于醫療器械的一些特殊要求,對于醫療設備使用的步進電機的選型又有一些特殊的要求
-

-
2020-11-19 步進電機如何應用于自動機械
機器人在生產中用于擔任簡單的動作,如人一樣能識別各種信號。使用直流伺服電機可以快速驅動。用步進電機驅動輕載,可完成人手指的抓取功能。步進電機低速驅動時比直流電機輸出轉矩大,可開環控制,不需要傳感器,電機體積小,今后有希望廣泛使用。 在應用步進電機的機器人中,步進電機與減速器一起使用的情形很多。驅動低速大轉矩負載時,常使用諧波減速器。生產線上使用了大量的簡單結構的機器人,如擰螺釘機器人、搬運機器人、測量機器人等,使裝配線自動、省力。
-
-
2020-11-17 步進電機的發展史
電機為工業發展不可缺少的一大要素,并扮演著重要的角色。電機的應用不僅在動力應用方面不斷擴大,而且在控制領域的使用范圍也在不斷擴大。隨著控制電機重要性的增加,控制電機的使用量也逐年增加。步進電機是一種控制電機,不使用反饋回路,就能進行速度控制及定位控制,即所謂的電機開環控制。其應用主要以處理辦公業務能力很強的OA(Office Automation,辦公自動化)機器和FA(Factory Automation,工廠自動化)機器為核心,并廣泛應用于醫療器械、計量儀器、汽車、游戲機等。就數量來講,OA機器方面的應用約占步進電機使用總數的75%。
-

-
2020-11-16 步進電機的維護要點和保養步驟
步進電機應存放在環境溫度為一40~ +50C、相對濕度不大于95%的清潔通風良好的庫房內,空氣中不得含有腐蝕性氣體。運輸過程中應小心輕放,避免碰撞和沖擊,嚴禁與酸堿等腐蝕性物質放在起。防止人體觸及電機內部危險部件, 以及外來物質的干擾.保證電機正常工作。但大部分切削液、潤滑油等液態物質滲透力很強,電機長時間接觸這些液態物質,很可能會導致不能正常工作或使用壽命縮短。因此, 在電機安裝使用時需采取適當的防護措施,盡量避免接觸上述液態物質,更不能將其置于液態物質里浸泡,當電機電纜排布不當時,可能會導致切削液等液態物質沿電纜導人并積聚到插接件處,繼而引起電機故障。因此,在安裝使用時盡量使電機接插件側朝下或朝水平方向布置,當電機接插件側朝水平方向時,電纜在接人插接件前需作滴狀半圓形彎曲, 當由于機器結構的關系,難以避免要求電機插接件側朝上時,需采取相應的防護措施。
-

-
2020-11-13 步進電機的控制原理
步進電機是一種機電- -體化產 品,步進電機本體與其驅動控制器構成一- 個不可分割的有機整體,步進電機的運行性能很大程度上取決于所使用的驅動控制器的類型和參數。
-

-
2020-11-13 步進電機驅動電源的結構及原理
步進電機的驅動電源與步進電機是-個相互聯系的整體,步進電機的性能是由電機和驅動電源共同確定的,因此步進電機的驅動電源在步進電機中占有相當重要的位置。
-
-
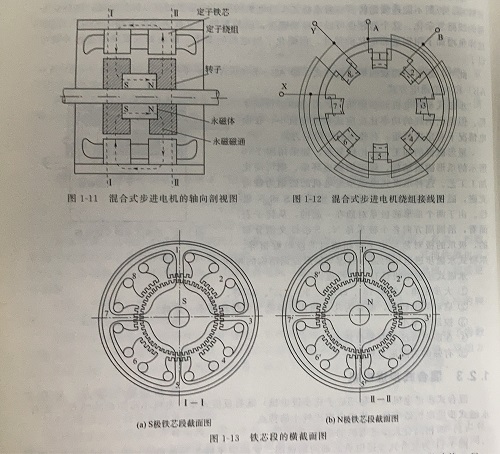
2020-11-12 混合式步進電機的結構及工作原理
混合式步進電機(又稱感應子式步進電機)既有反應式步進電機小步距角的特點,義有永磁式步進電機效率高、繞組電感比較小的特點。 (1) 兩相混合式步進電機的結構 圖1-11為混合式步進電機的軸向剖視圖。它的定子鐵芯與單段反應式步進電機基本相同,即沿著圓周有若干凸出的磁極,每個磁極的極面上有小齒,機身上有控制繞組:定子控制繞組與永磁式步進電機基本相同,也是兩相集中繞組,每相為兩對極,控制繞組的接線如圖1-12所示。
-
-
2020-11-11 步進電機的用途及優勢特點
一、步進電機的用途 隨著自動控制系統和計算裝置的不斷發展,在普通旋轉電機的基礎上產生出多種具有特殊性能的小功率電機,它們在自動控制系統和計算裝置中分別作為執行元件、檢測元件和解算元件,這類電機統稱為控制電機。顯然,從基本的電磁感應原理來說,控制電機和普通旋轉電機并沒有本質上的差別,但普通旋轉電機著重于對啟動和運行狀態的力能指標的要求,而控制電機則著重于特性的高精度和快速響應。 各種控制電機從它們的外表看差不多都是一一個圓柱體,中間有一根轉軸, 體積- -般都比較小,因此控制電機是一種微電機。從它們完成的任務來看,各種控制電機又各不相同,有的用來帶動自動控制系統中的機構運動,有的用來量測機械轉角或轉速,有的可以進行三角函數運算,有的可以進行積分或微分運算等。
-

-
2020-11-07 什么原因最容易引起電機失速
什么原因最容易引起電機失速 原因: 手動/電動切換手柄被鎖死, 電機在轉但是閥門不動 處理:來回轉動手輪。

